誰都有 emo 的時候,但不是每個人都能找到人抱一抱。
這個痛點,也被科學家 Alexis Block(以下簡稱布洛克)看到了。從 2017 年開始,她就在研究如何讓機器?學會擁抱。后來,她加入了著名的德國“?普所”——這里曾出過 37 位諾?爾獎得主。
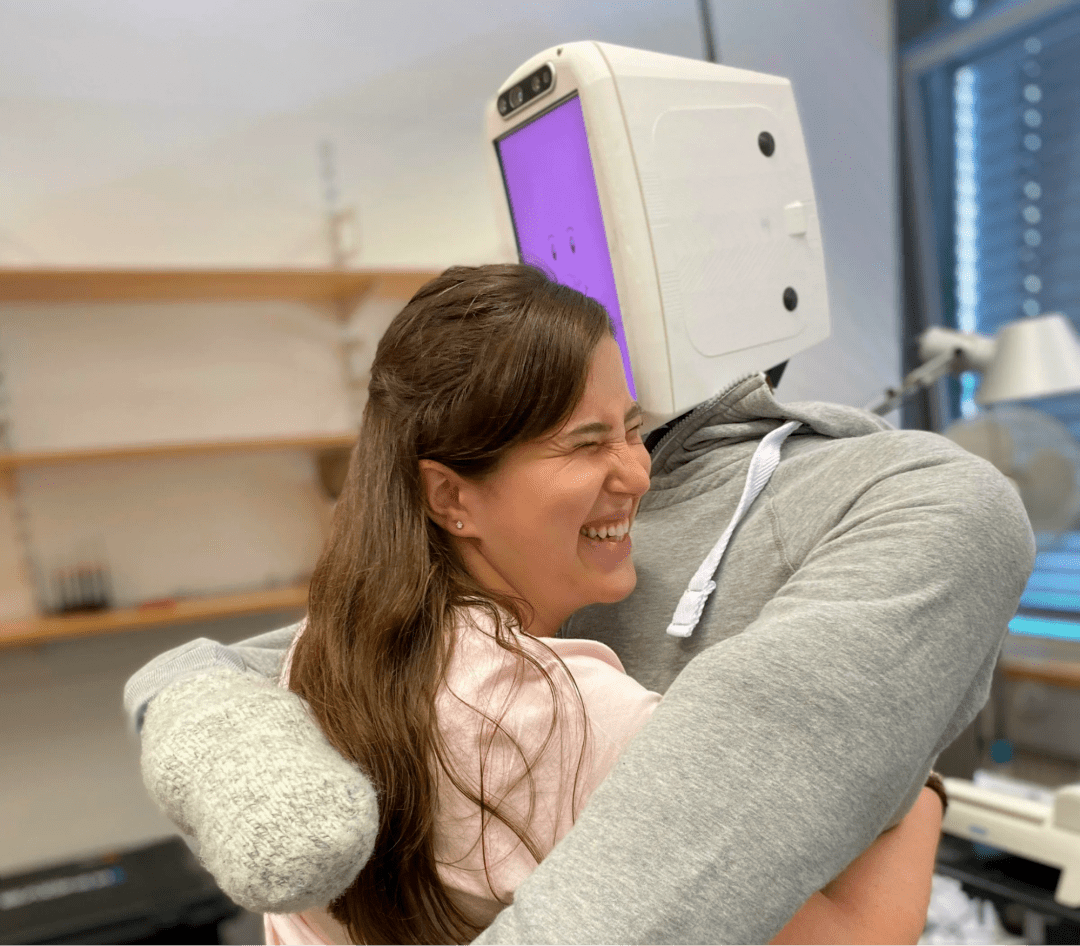
這個項目可沒那么容易。因為他們做了 6 年的這款機器人,并不冷冰冰, 非常有人味兒:
這種擁抱真實到什么程度呢?真實到參與前期實驗的人們甚至都不愿意稱之為“它”。
更奇妙的是,大家紛紛說起被機器人擁抱那一刻的感受時,都有具體的對應,像“擁抱愛人”,像是“來自母親的安慰性擁抱”,對方仿佛是“葬禮上的某個遠房親戚”、“在足球比賽中見到的朋友”,甚至有人說像在“擁抱前任”。
這種情感對應的差異,與當時人們的心理狀態有關,也和機器人在每次試驗中擁抱他們的動作和程度相關。
但這都在說明,馬普所研發的這款 HuggieBot 3.0 挺“人模人樣”的。
馬普所為什么要教機器人擁抱?
人類貪戀肌膚之親。
自被父母從襁褓里抱起來,人們就開始與他人親密接觸,我們在被輕撫、擁抱與按摩時,荷爾蒙被釋放,能夠極大緩解壓力、焦慮,降低心率、血壓。
特別是持續三秒種以上的緊緊擁抱,會更加強人們肌膚觸碰時的愉悅程度,這也被稱為“深層壓力觸摸”。
人們每天“擁抱 4 次才可以生存,至少要抱 8 次才能身心健康”,美國知名心理治療師維琴尼亞·薩提亞提出過“四個擁抱”理論。
但你懂的,并不總有人能時時刻刻陪伴你,所以你才會通過裹緊被子來自行實現“深層壓力觸摸”。
陪伴和慰藉的缺位,人們希望科技能填補。
比如,就有團隊做出了能夠接收觸覺信息的電子腕帶:連接手機藍牙,一方點擊發送信息,另外一個人手上的腕帶就會擠壓與震動。

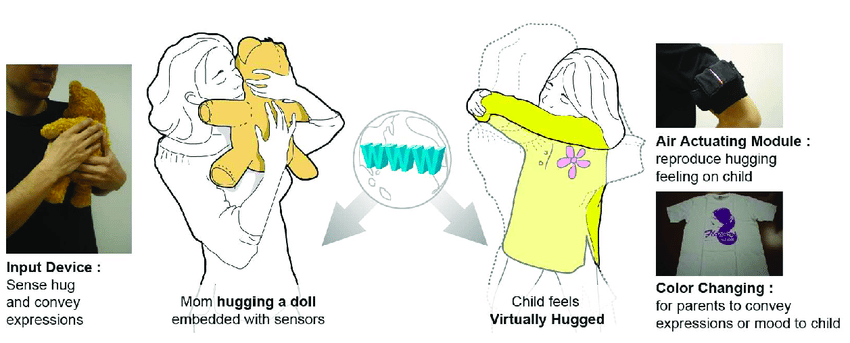
也有團隊發明了“擁抱衫”,這些衣服內嵌傳感器,被用在自閉癥譜系障礙的兒童身上:家長在一端抱住一個娃娃,傳感器就能夠捕捉到擁抱的位置、力度、溫度甚至心跳,以加熱、振動和充氣的形式,讓另一端的小朋友感知到。
但這些還遠遠不夠。
HuggieBot 的研發員發現,人們對擁抱特別敏感,尤其是“觸摸位置”和“接觸強度”這兩方面。
兩個人在感情上越親近,他們被允許接觸的區域就越多,但對于本不親近的人來說,稍微抱錯一點位置就會成為“冒犯”;另外,擁抱的強度不夠,容易顯得敷衍,而太過用力就會弄疼對面的人。而且對于這種強度的感受還需要因人而異。
所以像是擁抱衫等等的發明,還是沒辦法還原一個足夠溫暖、真實的擁抱。
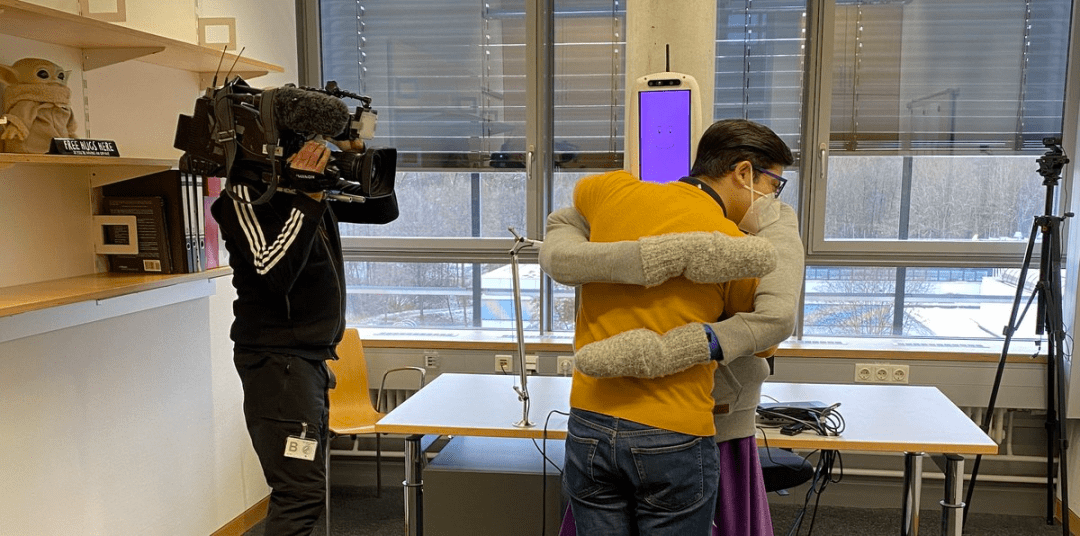
特別是在經歷了疫情之后,人們的情感連結在距離與阻礙中變得更加脆弱,更加渴望擁抱。HuggieBot 的主創成員布洛克說, 他們研發這款機器人的目的就是希望能通過它送出高度擬人的溫暖擁抱,來寬慰那些特別是因為疫情而產生社交疏遠的人。
給出一個“完美抱抱”,并不簡單
怎么提高擁抱的舒適度?擁抱這種東西太玄了,但科學家還是想給它量化一下。
2017 年,團隊開始了最初嘗試,他們做了一個看起來非常粗糙的機器人,并一共設計了 12 種不同類型的擁抱。
接著,他們找來了 30 個志愿者,讓機器人給每個人送來一打抱抱:擁抱時間有長有短,姿勢也不盡相同。
出乎意料的是,盡管這個機器人重達 450 磅,跟人差不多高,但沒有人因此被壓迫到,也沒有人因為害怕而中途跑掉。
反而還有好些人說,“很享受與機器人擁抱,因為這種體驗很新奇,并不奇怪。”這些積極反饋鼓舞了布洛克和她的團隊,他們甚至想要挑戰一下“機器人能不能給出一個比真人還好的抱抱”。
于是,他們先是調研了市面上幾種機器人,從最早(1992 年)也是最著名的 Temple Grandin 擠壓機開始。
看吧,這都不算是機器人,就只是一臺機器。機器里的兩塊泡沫板擠壓產生壓力,模擬擁抱,它被廣泛應用于對自閉者兒童的治療。
后來,又在此基礎上衍生出了模擬動物的產品,但這只是讓其變得更“用戶友好”了而已。
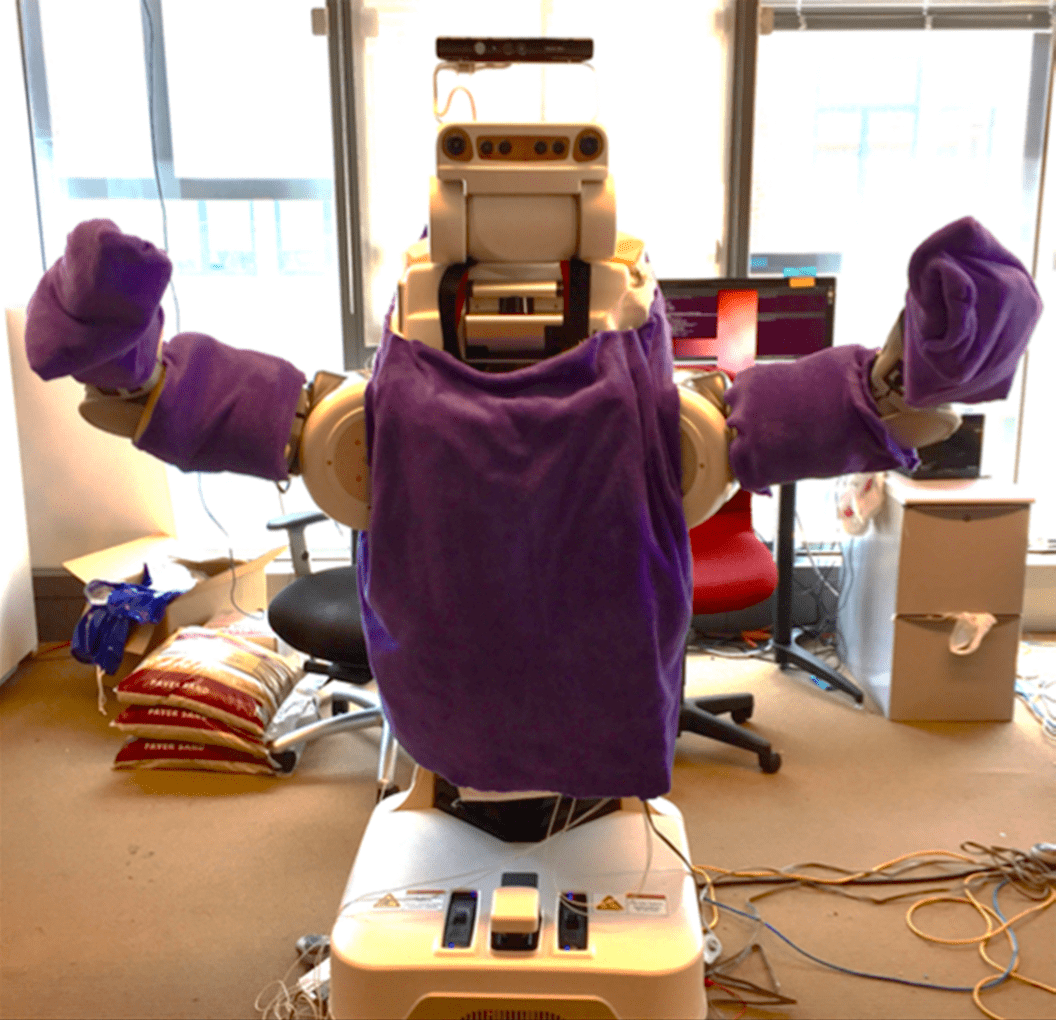
基于此,布洛克他們做出了初代 HuggieBot。除了給機器人裹上厚厚的紫色棉布之外,他們還用上了各種加熱元件,為的就是讓 HuggieBot 足夠柔軟、溫暖。
他們還想再往前邁一步:讓機器人更自主。
于是,他們在機器人的背部加上了觸覺傳感器,這些傳感器可以拉伸,能檢測到用戶什么時候開始接觸,以及什么時候想結束擁抱,從而預判機器人應該給用戶一個“多久、多緊”的抱抱。
很快,布洛克發現他們想得太簡單了。
人們對擁抱的開始與結束反應格外敏感。特別是一旦用戶表示他們準備好被釋放,就要立即釋放;松開地太早或太晚,用戶就會不高興。
也就是說,目前這個觸覺傳感器還不夠用。于是,他們開始研發 HuggieBot 2.0—— 業界第一個使用視覺與觸覺同時感知,以此提供擁抱的智能設備。
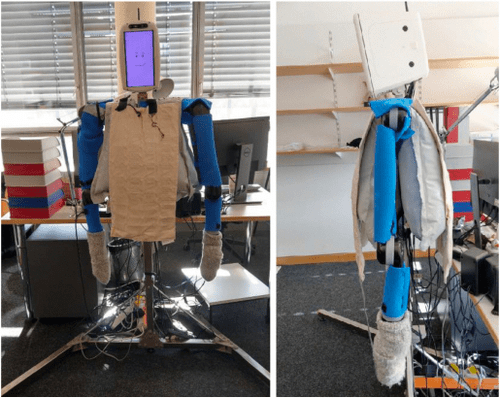
上圖這個方方的呆萌頭部,其實大有學問:它是一個定制的 3D 打印的箱子,里面有控制整個機器人的戴爾 OptiPlex 7050 微型計算機、英特爾 RealSense 深度感應相機、機器人的面部屏幕、一個小型揚聲器和許多條電纜。
它的下身專門裝了一個 V 形底座,這能讓用戶更容易靠過來抱抱。它的身體里還有一個定制的傳感系統,叫 HiggieChest,內有一個氣壓傳感器和一個話筒放大器。
簡單來說,這樣能夠能把用戶的擁抱觸覺快速傳到機器人的全身,這樣就方便快速做出交互反應了。
同時,為了讓機器人根據人的不同體型做動作調整,以及避免其金屬手臂傷到來索抱的用戶,機器人手臂被設定得十分靈敏和識趣。
首先,機器手臂上的每個關節扭矩都有一個最大閾值,一旦超過了就會停止運動;這些手臂非常靈活、敏感,用戶可以輕松就掰倒它們,一旦他們想結束擁抱,掰一掰就好了,直接向機器人傳遞“抱夠了”的信號。
不止擁抱,人們開始對機器人有更多期盼了
布洛克在實驗里一共采集了 32 名用戶的 512 次擁抱數據,從中發現了一個有趣的現象。
之前為了保證數據采集的精準度,研究團隊特意囑咐了受試者們單次擁抱只能做一個動作,比如撫摸、擠壓等。
但是通過實驗室的錄像,他們發現,32 個參與者里面有 7 個人都不自覺地組合了多種手勢,有的人把摩擦和拍打連在一起,有的人在抱緊機器人之后放開一些,又輕輕拍了拍機器人的肩膀。
似乎在單純的擁抱之外,人們逐漸在機器人身上投射了更多的情感期盼。
在用戶反饋里,布洛克也驚奇地發現:比起程序設定好的“完美擁抱角度與過程”,用戶其實更喜歡機器人根據他們的動作做出“即興”的回應。
78.13% 的參與者都說,這種回應會讓他們感覺機器人更有活力,更真切,會覺得自己被對方理解了。當前這種動作回饋雖然完整,但太機械,“沒覺得機器人像他們那樣投入情感”。
所以,在最新版本——HuggieBot 3.0 中,團隊為機器人設置了提供“被動回應”與“主動回應”的能力。
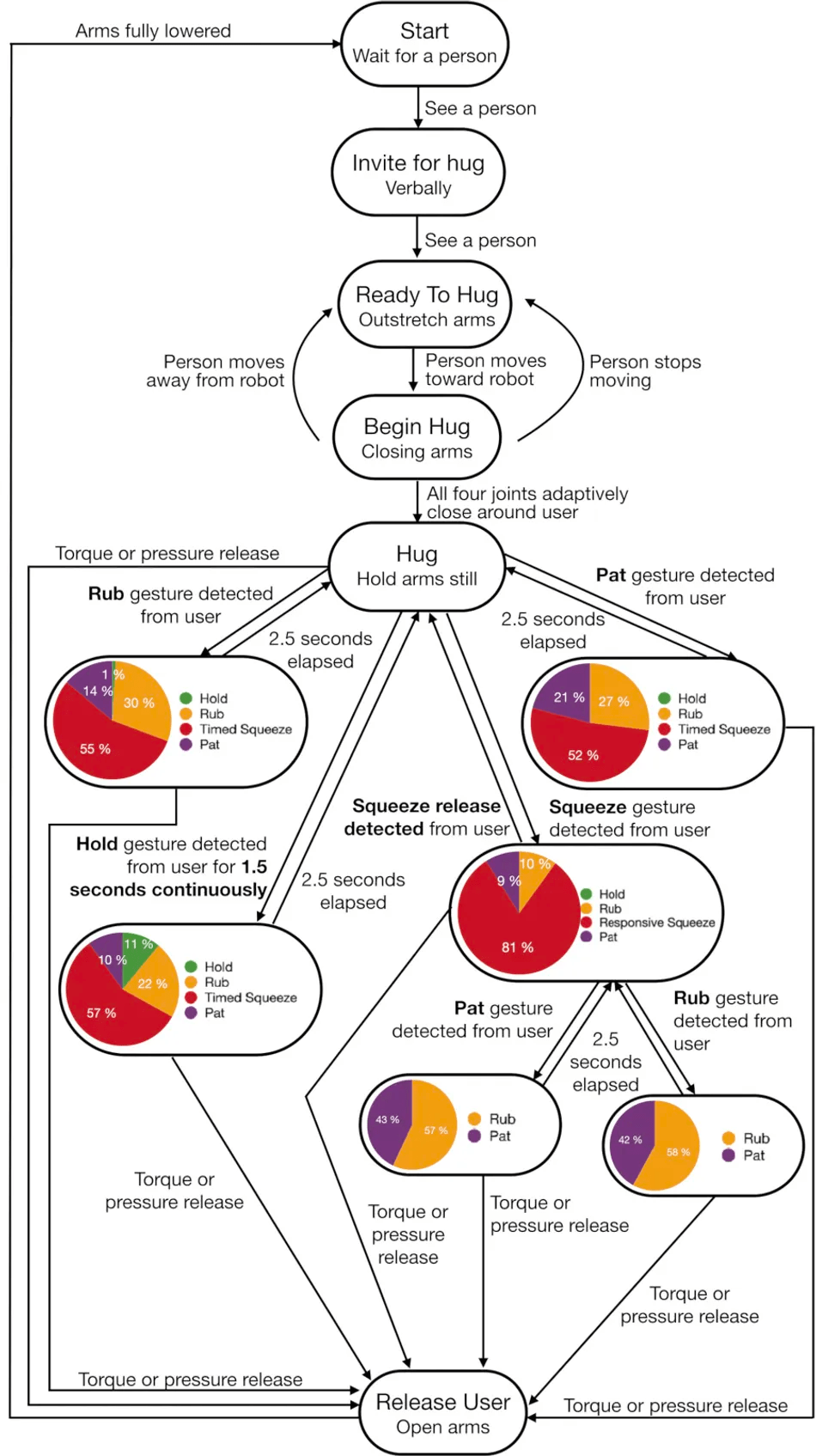
簡單來說,如果機器人監測到了用戶在保持抱抱姿勢之外,進行了拍打、擠壓、揉搓,機器人就會基于概率,做出不同的反應來回饋。
這些手勢可以一次性完成,也可以連續多次重復,機器人有足夠的耐心一次又一次地回應。這不比很多真人強多了嗎?
但如果人們長時間只是抱抱,沒有做什么其他動作的話,機器人就會觸發“主動回應”,這其中的間隔大概有 1.5 秒。
所以,擁抱看上去簡單,但走心很難。互動也得掌握好火候。
到目前,布洛克團隊通過這些年的量化研究,也總結出了一套“擁抱黃金標準”:
捫心自問,抱人的時候你做到這些了嗎?
目前布洛克團隊正在緊鑼密鼓地開發第四代擁抱機器人,就算此刻沒辦法入手一個機器人療愈自己,也可以先活學活用起來。
這么看下來,真誠永遠是必殺技。我們不需要一個“完美的擁抱”,我們需要的是“真誠的擁抱”。
一個彩蛋
為了防止有的用戶“入戲”太深,用力過猛,科學家們還給機器人換了一套新的軀干:
通過沿邊緣熱封,然后在熱封的頂部使用 HH-66 乙烯基水泥,更堅固,更承壓。
因為之前有人抱得太緊,結果機器人漏氣了啊!
參考文獻
如有需要請聯系sns@guokr.com